筆者及多位業界先進,曾於技師報介紹地面光達於工程上之應用,截至目前為止,已有許多工程均已加入地面光達掃瞄輔助,透過雷射掃瞄高精度特性,不論是對案件的工期及資料的分析,均有很大的幫助,目前國內多項營造工程及監測工程,均已引用此技術(如邊坡監測等)。然而當跨領域討論時,由於點雲資料龐大,攜帶不易,雖有Web Share技術可供討論使用(如下圖1),但大部分工程單位習慣仍以模型討論之。以往需透過精細的地面光達點雲資料,進行人工建模,此法曠日廢時,且往往建模並非工程中主要之目的,因此考量成本情況下,最終受限點雲龐大、建模昂貴,而導致案件討論時反而受限於手中素材,較無法進行跨領域初步溝通討論。

圖1 地面光達成果展示示意圖
近年來,多位土木先進亦曾提出往透過影像密匹配技術(如Bentley Context Capture),利用高重疊率影像,不論是有人機的高解析度航空影像(如AOS-One X5),或是高機動性的UAV影像,甚至是地面照片均可進行自動建模,如下圖2。然此法受限於高解析度航空影像,雖然效果最佳,但成本較昂貴,因此適合大面積施作;而UAV國內法令尚未臻完善,且部分工程受限於禁航區、人口密集區、鐵路交通幹道等無法施放等因素,因此在無法完全發揮使用。因此希望藉由地面光達掃瞄技術的輔助,來完成小範圍模型建置。

圖2 傾斜攝影影像密批配建模
以往影像密匹配,需要藉由高重疊影像去計算出密配點(即大家常聽到的密匹配點雲),再將這些密匹配點雲,透過前方交會計算,藉此計算出物空間點雲的三維地面坐標,藉由此產製三維模型,並於最後敷貼材質。
隨著電腦科技的進步(繪圖處理單元),目前電腦運算的效能,可以說是突飛猛進,透過CUDA平行運算台的蓬勃發展,現今已慢慢普及應用在各科技領域(如AR/VR、AI人工智慧、生物科技等),此時處理大量的點雲運算,已不再是天方夜譚,因此衍伸出地面光達點雲自動建模。
地面光達點雲於掃瞄時,記錄了掃瞄角度、掃瞄距離、方向性等資訊,並藉此推算出物空間的三維坐標,因此成了密匹配點雲的最佳基礎資料。
本次資料採用地面光達(FARO X330),快速獲取高精度點雲資料,並結合UAV航拍作業,外業作業僅需一天,即可獲取高精度點雲資料及高解析度照片,大量的資料成了密匹配的最佳素材。本次掃瞄成果,經由內業Bentley Context Capture軟體拼接處理計算,僅需1~2天即可處理完成,且資料均可產製許多3D GIS平台格式、及工程設計軟體之常見格式,模型成果可讓更多人探討使用。

圖3 UAV影像密批配建模
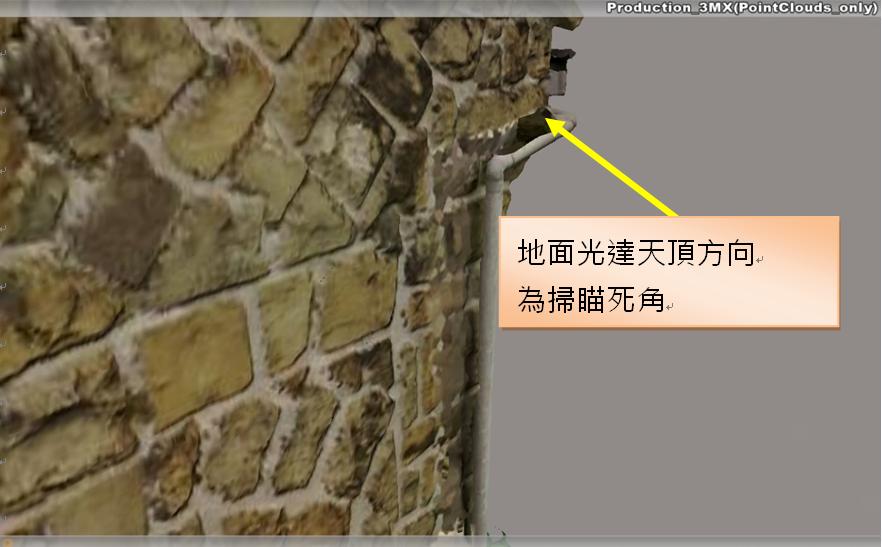
圖4 地面光達掃瞄密批配建模

圖5 地面光達掃瞄結合UAV影像密批配建模

圖6 地面光達掃瞄結合UAV之三維模型
未來於工程建置時,除可以地面光達紀錄測製實際現況,藉由高精度點雲比對設計模型,藉此進行施工階段檢討評估,並利用UAV紀錄工程各階段現況圖,同時可利用光達點雲、及UAV搭配自動建模之成果,進行跨領域專家學者討論,透過視覺化及數字化搭配,可節省大量的工時及成本,目前國外工程設計,均已陸續導入此作業流程,藉此提升效率並提供更佳成果。
圖7 多感測器建自動三維模型建置
【本文稿經由台灣省土木技師公會技師報同意轉載;未經允許請勿任意轉載】

來來來哩來按個贊!
精選文章
新進文章

")









")

")
")



實務探討")

