朝陽科技大學營建工程系
許耿蒼、洪嘉鍵、童建璋、莊俊義
袁意承、吳柏昇、楊立湧、楊冠穎
前言
無人飛行載具(Unmanned Aerial Vehicle,UAV),近年來的技術發展日益進步,此技術也成為土木工程領域一項新興技能。再加上現在土木營建業面臨的人力短缺的問題,若能有效了解無人飛行載具特性,在營建業領域的實際應用及帶來的效益,對於相關從業人員,具有相當大的鼓勵。雖然無人機應用,目前亦存在一些挑戰,如複雜環境下的飛行困難、信號干擾、穩定性問題,筆者仍採深入淺出方式,探討無人機在工程方面的具體應用,分享讀者。
10多年前無人機的出現,讓空拍測繪有了其相當大的便利性,如,圖1,為海岸沖刷狀況,正射影像拼接影像圖資,不用再依賴費用昂貴的航空器,即可取得整體海岸沖刷在歷年變化下的監測圖資訊息;如,圖2,依照航空攝影測量學的原理,拍攝過程使相片間具有一定的重疊率條件,提供足夠的影像匹配來萃取特徵點,可建置三維立體影像,另可配合區域佈設地面控制點座標系統,產製細緻度較高的模型。

圖1 海岸沖刷狀況正射影像拼接圖
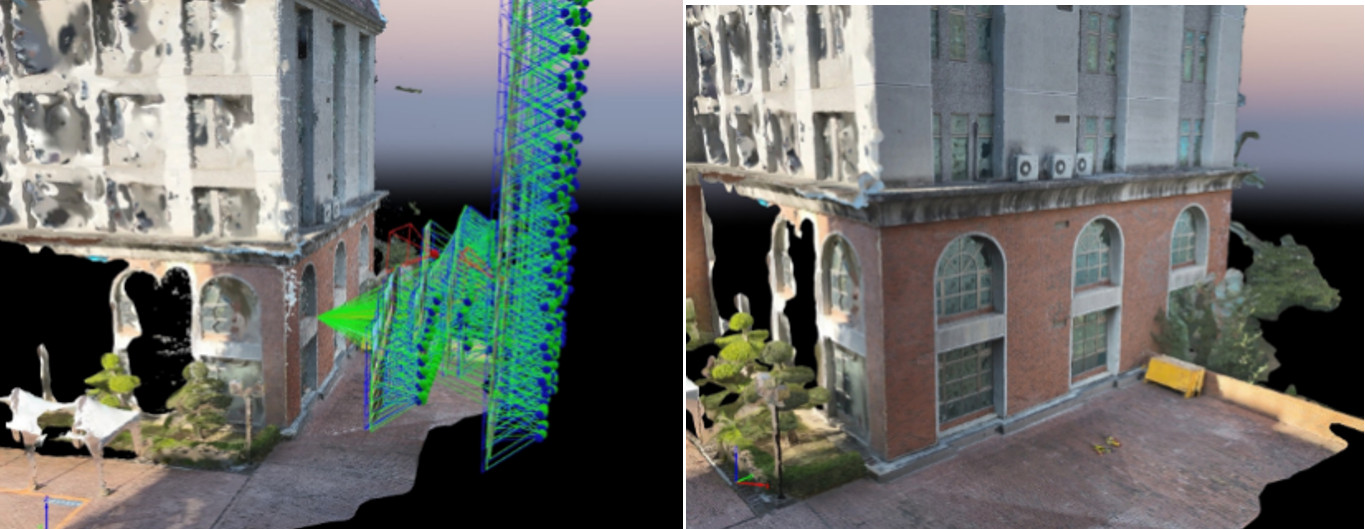
圖2 無人飛行載具建物三維模型建模
一、UAV儀器設備
目前市面上功能豐富且應用範圍廣泛的無人飛行載具,除基本之攝影與拍照功能外,在功能上較進階的機型,具有下面主要特點:如表1,若配備機械快門的相機有助於捕捉高速運動的目標時避免失真,提供更清晰、更準確的影像,擁有4,800萬像素的相機、具有高解析度的熱成像相機,解析度達640x512,測溫範圍在-20℃至150℃之間。RTK 技術(實時動態定位),搭配e-GNSS即時動態定位系統,透過虛擬基準站與衛星定位協同作業,提高定位經度並賦予相片絕對座標值。相較於一般無RTK技術的無人機,不需額外設置基準站,就有更高的定位精度。
表1 具RTK與紅外線熱影像之無人飛行載具性能表
|
巡航時間 |
45 分鐘 |
|
RTK 模組 |
支援網路RTK、自訂網路 RTK服務、D-RTK 2 移動站,cm公分級定位。 |
|
廣角相機 |
等效焦距 24 mm,4800 萬像素 |
|
長焦相機 |
等效焦距 162 mm,1200 萬像素,56 倍混合變焦 |
|
GNSS |
GPS + Galileo + GLONASS |
|
熱成像鏡頭 |
DFOV:61°,等效焦距 40 mm,解析度 640×512 |
|
紅外線測溫精準度 |
±2℃ 或 ±2%,取較大值 |
|
測溫範圍 |
-20℃ 至 150℃(高增益模式) |
二、內建RTK與紅外線熱影像UAV在工程上應用
標題所述UAV(內建RTK與紅外線熱影像)圖資訊號,應用範圍更為寬廣。紅外線熱影像技術,合適用於檢測淺層且大面積之結構損傷,如使用於檢測結構碳纖維貼片補強品質、或於老舊建築物外覆磁磚之黏結不良位置。在前期研究中,採用紅外線熱影像技術,針對外覆磁磚黏結不良位置偵測有相當良好的相關性,如圖3;為使用UAV搭載之紅外線熱影像相機進行拍攝,圖3左邊,為紅外線熱影像圖;圖3右邊,為對應之光學影像。拍攝區域為前期研究中磁磚內部預埋瑕疵之牆面進行拍攝,在圖3左圖之白色虛線方框內,可觀察到內部預埋之牆面內部之瑕疵,顯示瑕疵區域,亦可清楚顯影於紅外線熱影像中。
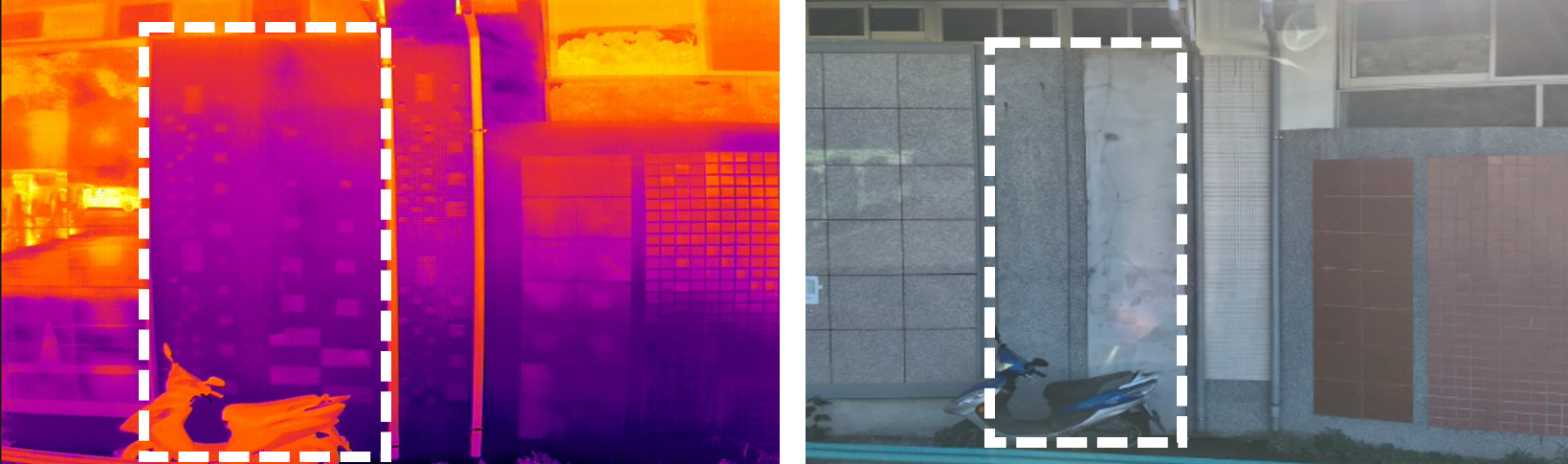
圖3 無人飛行載具紅外線熱影像與光學影像照片
UAV搭載紅外線熱影像相機,另一優勢為可在其可飛行區域的高度進行拍攝,可突破傳統手持式熱像儀拍攝高樓層外牆,較不方便的問題,如圖4左方,有一塊長400mm的正方形鐵板,將其升溫後,再利用UAV搭載紅外線熱影像相機進行拍攝,其高度5公尺拍攝時,紅外線熱影像拍攝與辨識效果非常良好;而在圖5,為以不同飛行高度拍攝同一400mm的正方形鐵板的熱影像圖,若載具飛得越高,其影像就會變越小;進一步分析飛行高度與紅外線熱像儀相素的關係,如圖6,可藉由圖6像素與飛行高度關係,分析出檢測標的「合適的飛行高度值。」
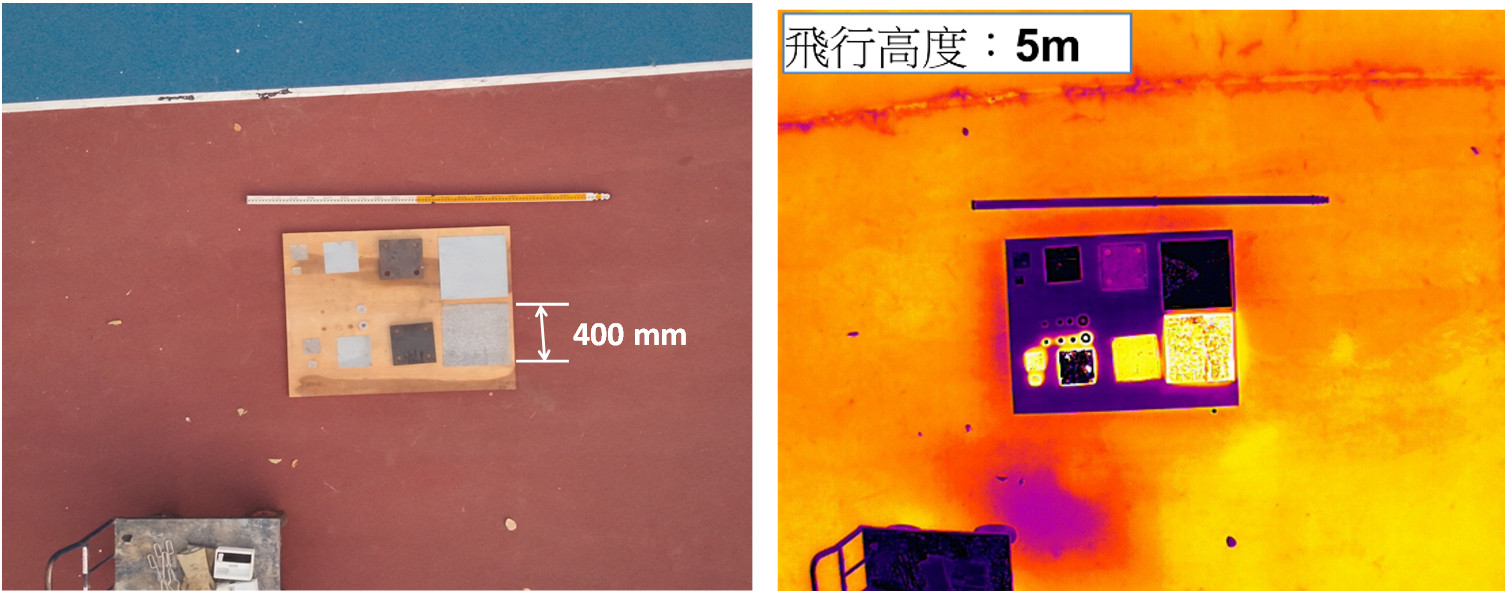
圖4 無人飛行載具紅外線熱影像與光學照片(5公尺高度拍攝)

圖5 無人飛行載具紅外線熱影像與光學照片
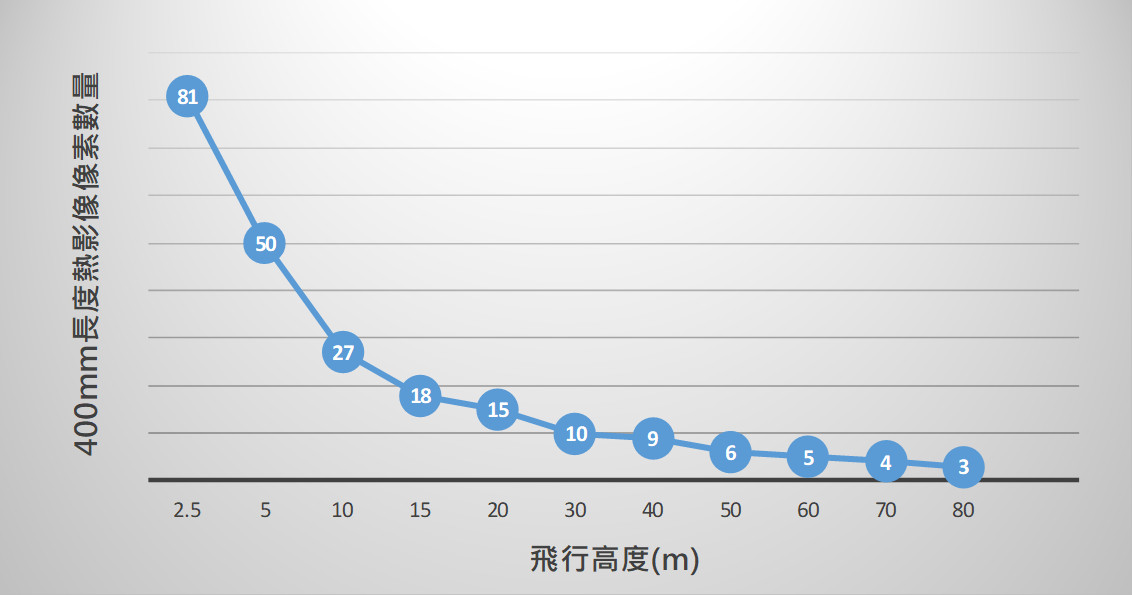
圖6 無人飛行載具飛行高度與像素關係圖
後續文中將介紹無人機在工程上應用之實例
例1.太陽能板缺陷檢測與評估
太陽能面板為綠能重要之一環,但其服務一段時間後,可能出現影響發電之瑕疵,如熱斑效應、太陽能電池串接不良,以及遮陰,對太陽能板的效能和安全性都構成重大威脅。這些問題可能導致能源損失、安全隱患,甚至太陽能系統整體效能下降,因此定期的檢測和監控,以及嚴格的品質管理和安裝規範都是至關重要的,以確保太陽能板的正常運行和安全性。然而在大面積的太陽能面板中,如何找到瑕疵位置為一重要課題,如圖7,為朝陽科大理工大樓之太陽能面板,紅外線熱影像檢測之影像,圖中框選位置即為異常之處。
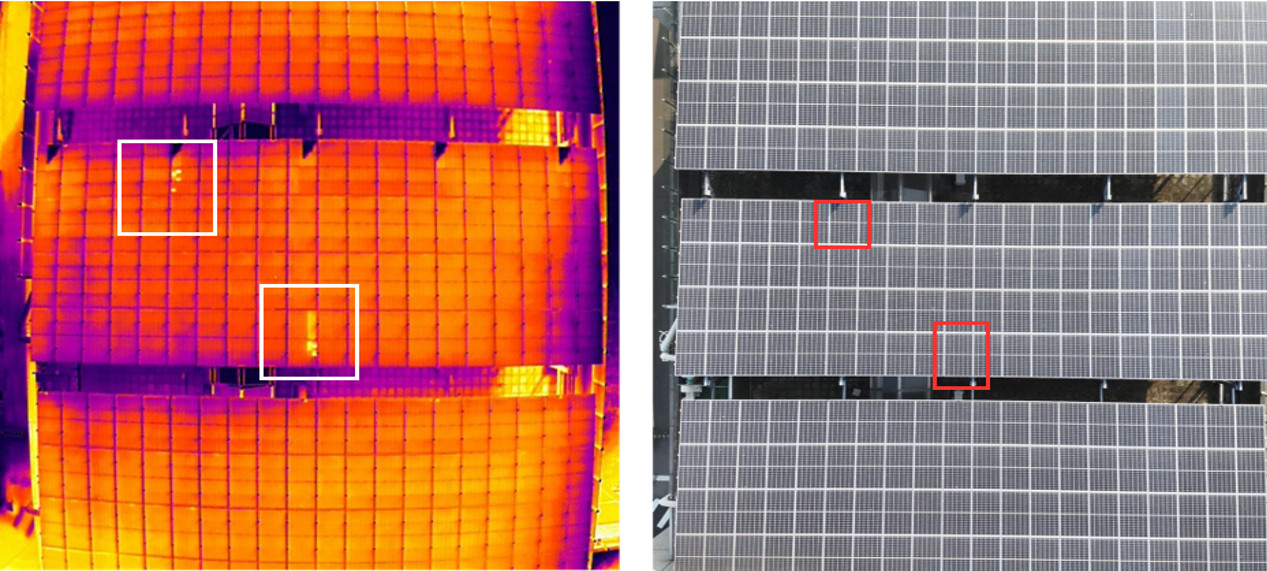
圖7 朝陽科大理工大樓太陽能面板紅外線熱影像檢測影像
例2.高層建築外牆瓷磚黏貼瑕疵檢測
傳統檢測高層建築外牆瓷磚的損壞和剝落,需要以吊掛或搭架的方式進行檢測(圖8),若利用無人機搭載紅外線鏡頭系統,則可進行高層建築外牆瓷磚剝落損壞的非破壞性檢測試驗。這次的標的物大樓外牆牆面,採用打診與UAV紅外線熱影像儀兩種方法進行檢測,UAV搭載紅外線鏡頭具有明顯的優勢,可快速到達欲檢測位置並釐清其狀況,圖9左圖,牆面紅色區域為打診法所測出有出現瑕疵位置區域,比對右邊之外牆磁磚有其一致性;然而紅外線熱影像儀,可能會受季節、天候、時間、氣溫、牆面的方位、距離、裝修材料的色調、建築物冷暖機具發熱等受到影響,但其便利性,可先作為大樓外牆黏貼瑕疵之快篩工具,確認磁磚瑕疵大致走向後,再進行細部檢測作業釐清狀況。

圖8 大樓外牆磁磚打診檢測

圖9 外牆打診法結果與紅外線熱影像
例3.風力發電機葉片脫層瑕疵
風力發電機組常見的缺陷,分別有葉片、塔柱、軸承、齒輪組、電子元件等。其中葉片被視為最容易損壞的機構組件,其他常見電機組損壞原因則包括雷擊損傷、局部表面磨蝕和惡劣氣候。隨著風力發電機組容量的增加,輪轂高度和葉片長度都大幅提升,且常設於空曠區域中長時間運轉,容易受到髒污影響,增加雷擊的機率。即使葉片內部裝有雷擊保護裝置,潮濕或膠合瑕疵可能使其失效,導致葉片或整個機組損壞,如圖10,為團隊無人機所拍攝到之葉片脫層瑕疵。葉片局部表面鏽蝕,通常由空氣中的顆粒與葉片碰撞引起,使葉片表面變得不平整,可能形成鏽斑縫,若未及早發現,可能擴大形成細微裂縫,這些裂縫如果沒及早發現,可能會進一步增大,如圖11、圖12,為UAV使用光學與紅外線熱影像拍攝檢測之照片。

圖10 風機葉片的損傷

圖11 風機葉片鏽斑、脫層損傷光學影像與紅外線熱影像
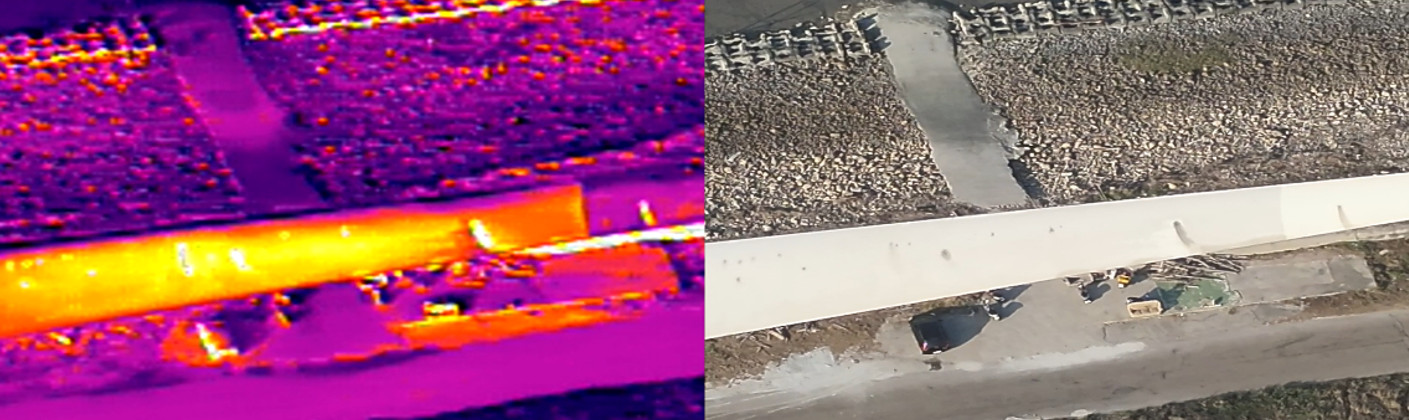
圖12 風機葉片鏽斑、脫層損傷光學影像與紅外線熱影像
結語
本次實驗發現相較於傳統手持式熱影像檢測,無人機搭載紅外線鏡頭系統具有明顯的優勢。無人機能夠快速進行大規模巡檢,輕鬆且安全地獲取高處的異常情況,這種技術的優點,在於不需一開始就使用吊車或搭建鷹架,而是可以通過無人機快速估算與發現異常區域,進而衡量是否需要進一步的人員或設備支援。此技術可降低檢測成本,減少人員懸掛的勞工安全風險,為結構物評估在快速快篩檢測應用上之利器。
參考文獻
1.洪嘉鍵(108年5月)。「整合三維建物模型與紅外線熱影像進行結構缺陷偵測研究」。碩士論文,朝陽科技大學營建工程系。
2.陳瑞鈴(106年)。「建築外牆瓷磚非破壞性檢測之研究-以紅外線熱顯像技術結合無人飛行載具為例」。內政部建築研究所協同研究報告。
3.王亦恩、陳冠霖、蕭文澤、曾釋鋒(109年)。「淺談風力發電機非破壞性檢測」。科儀新知,第224期。
【本文稿經由台灣省土木技師公會技師報同意轉載;未經允許請勿任意轉載】

來來來哩來按個贊!
精選文章
新進文章















")
")



